MimicDroid: In-Context Learning for Humanoid Robot Manipulation from Human Play Videos Rutav Shah, Shuijing Liu*, Qi Wang*, Zhenyu Jiang*, Sateesh Kumar, Mingyo Seo, Roberto Martín-Martín, Yuke Zhu. Under review, 2025. Paper | Website | Benchmark | Dataset
Beyond Canes and Guide Dogs: A Survey of 40 Years of Robotics for Assisting People with Visual Impairments in Navigation, Wayfinding, and Orientation John Pohovey, Maria Lusardi*, Aamir Hasan*, Shuijing Liu†, Andre Schreiber†, Samuel Olatunji, Wendy Rogers, Katherine Driggs-Campbell. Under review, 2025. Paper | Dataset
Casper: Inferring Diverse Intents for Assistive Teleoperation with Vision Language Models Huihan Liu, Rutav Shah, Shuijing Liu, Yuchen Cui, Yonatan Bisk, Roberto Martín-Martín, Yuke Zhu. In CoRL 2025. Paper | Website | Website
SocialNav-SUB: Benchmarking VLMs for Scene Understanding in Social Robot Navigation Michael J. Munje, Chen Tang, Shuijing Liu, Zichao Hu, Yifeng Zhu, Jiaxun Cui, Garrett Warnell, Joydeep Biswas, Peter Stone. In CoRL 2025. Paper | Website | Code | Dataset
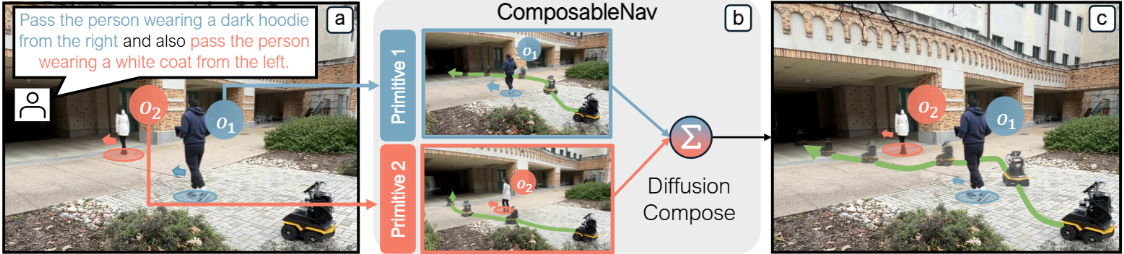
ComposableNav: Composable Instruction-Following Navigation in Dynamic Environments via Diffusion Zichao Hu, Chen Tang, Michael J. Munje, Yifeng Zhu, Alex Liu, Shuijing Liu, Garrett Warnell, Peter Stone, Joydeep Biswas. In CoRL 2025. Paper | Website | Code | Checkpoints
Learning Coordinated Bimanual Manipulation Policies using State Diffusion and Inverse Dynamics Models Haonan Chen, Jiaming Xu*, Lily Sheng*, Tianchen Ji, Shuijing Liu, Yunzhu Li, Katherine Driggs-Campbell. In ICRA 2025. Paper | Website | Code
Developing Wayfinding Robotic Support for Older Persons with Vision Impairments Samuel A. Olatunji, Megan A. Bayles, Shuijing Liu, Aamir Hasan, Katherine Driggs-Campbell, Wendy A. Rogers. In Assistive Technology, 2025. Paper
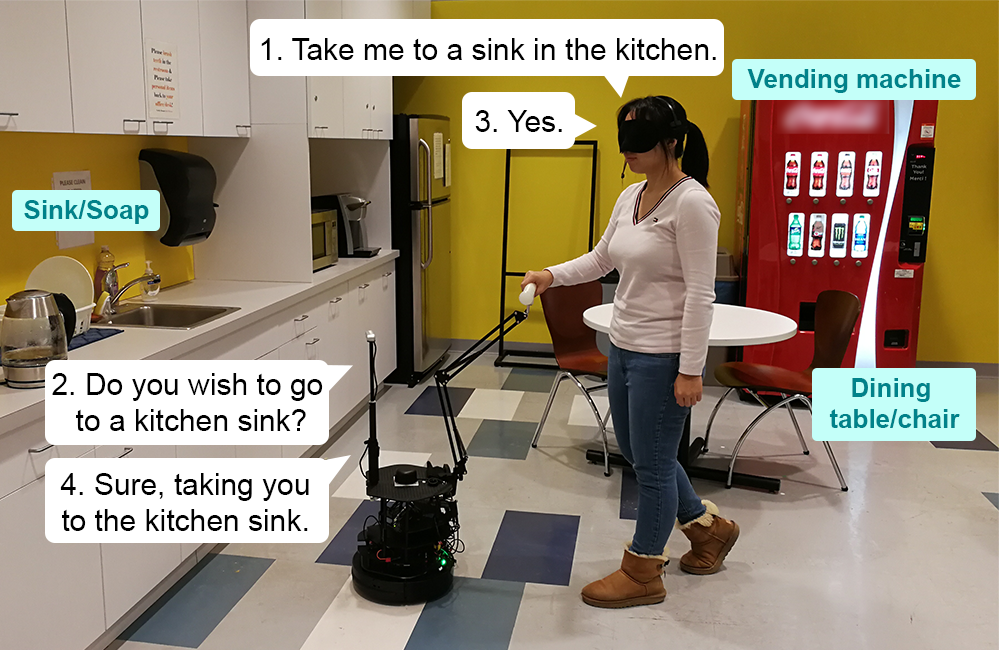
DRAGON: A Dialogue-Based Robot for Assistive Navigation with Visual Language Grounding Shuijing Liu, Aamir Hasan, Kaiwen Hong, Runxuan Wang, Peixin Chang, Zachary Mizrachi, Justin Lin, D. Livingston McPherson, Wendy A. Rogers, Katherine Driggs-Campbell. In IEEE Robotics and Automation Letters (RA-L), 2024. Paper | Website | Video | Code
Intention Aware Robot Crowd Navigation with Attention-Based Interaction Graph Shuijing Liu, Peixin Chang, Zhe Huang, Neeloy Chakraborty, Kaiwen Hong, Weihang Liang, Junyi Geng, D. Livingston McPherson, Katherine Driggs-Campbell. In ICRA 2023. Paper | Website | Video | Code Best poster award at IROS 2023 Last-Mile Robotics Workshop
Learning to Navigate Intersections with Unsupervised Driver Trait Inference Shuijing Liu, Peixin Chang, Haonan Chen, Neeloy Chakraborty, Katherine Driggs-Campbell. In ICRA 2022. Paper | Website | Code | Video
Decentralized Structural-RNN for Robot Crowd Navigation with Deep Reinforcement Learning Shuijing Liu*, Peixin Chang*, Weihang Liang†, Neeloy Chakraborty†, Katherine Driggs-Campbell. In ICRA 2021. Paper | Website | Video | Code
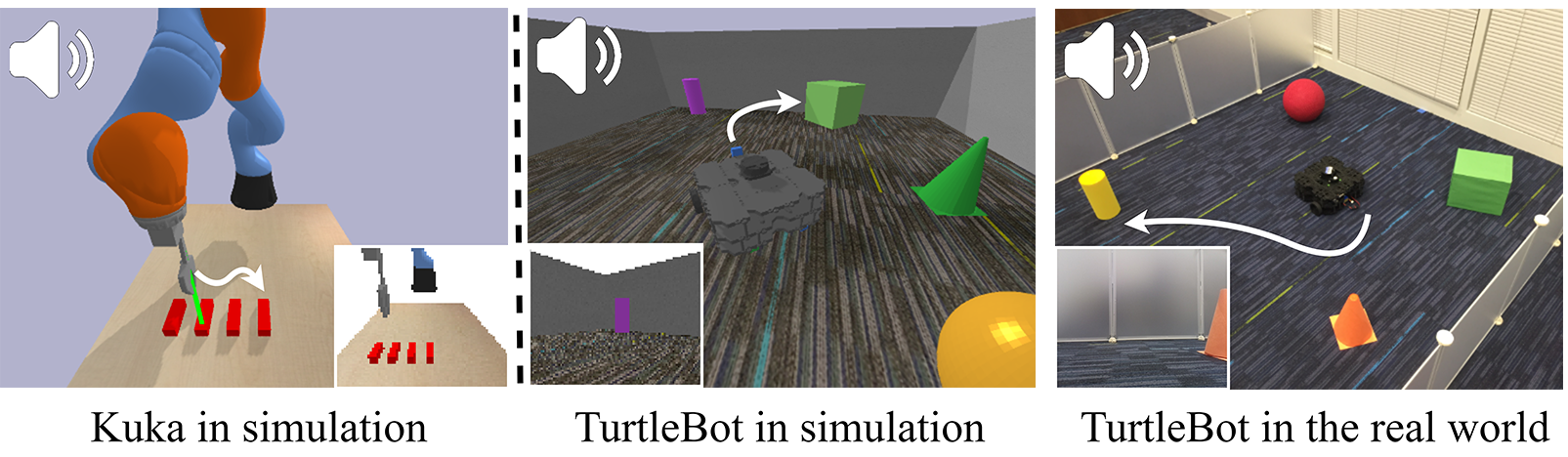
A Data-Efficient Visual-Audio Representation with Intuitive Fine-tuning for Voice-Controlled Robots Peixin Chang, Shuijing Liu, Tianchen Ji, Neeloy Chakraborty, Kaiwen Hong, Katherine Driggs-Champbell. In CoRL 2023. Paper | Website | Video
Predicting Object Interactions with Behavior Primitives: An Application in Stowing Tasks Haonan Chen, Yilong Niu, Kaiwen Hong, Shuijing Liu, Yixuan Wang, Yunzhu Li, Katherine Driggs-Campbell. In CoRL 2023. (Best Student Paper Award Finalist) Paper | Website | Code
Occlusion-Aware Crowd Navigation Using People as Sensors Ye-Ji Mun, Masha Itkina, Shuijing Liu, Katherine Driggs-Campbell. In ICRA 2023. Paper | Video | Code | Media coverage
Structural Attention-Based Recurrent Variational Autoencoder for Highway Vehicle Anomaly Detection Neeloy Chakraborty, Shuijing Liu*, Aamir Hasan*, Tianchen Ji*, Eric Liang, D. Livingston McPherson, Katherine Driggs-Campbell. In AAMAS 2023 (Full paper). Paper | Website | Code
Combining Model-Based Controllers and Generative Adversarial Imitation Learning for Traffic Simulation Haonan Chen, Tianchen Ji, Shuijing Liu, Katherine Driggs-Campbell. In ITSC 2022. Paper
Off Environment Evaluation Using Convex Risk Minimization Pulkit Katdare, Shuijing Liu, Katherine Driggs-Campbell. In ICRA 2022. Paper | Code
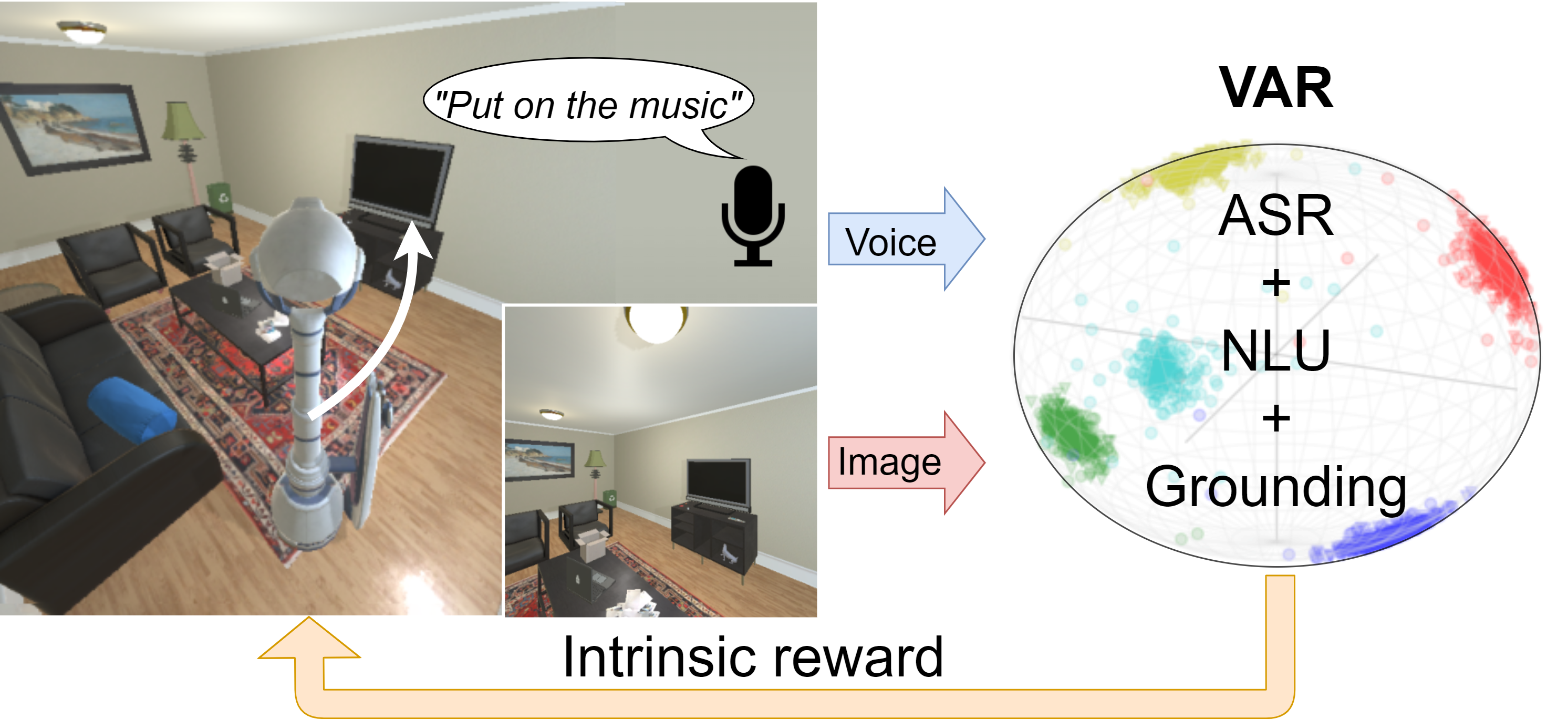
Robot Sound Interpretation: Combining Sight and Sound in Learning-Based Control Peixin Chang, Shuijing Liu, Haonan Chen, Katherine Driggs-Campbell. In IROS 2020. Paper | Website | Video
Learning Visual-Audio Representations for Voice-Controlled Robots Peixin Chang, Shuijing Liu, Katherine Driggs-Campbell. In ICRA 2023. Paper | Website | Code
An Interdisciplinary Approach: Potential for Robotic Support to Address Wayfinding Barriers Among Persons with Visual Impairments Megan A. Bayles, Travis Kadylak, Shuijing Liu, Aamir Hasan, Weihang Liang, Kaiwen Hong, Katherine Driggs-Campbell, Wendy A. Rogers. In HFES 2022. Paper
Robust Deep Reinforcement Learning with Adversarial Attacks Anay Pattanaik, Shuijing Liu*, Zhenyi Tang*, Gautham Bommannan, Girish Chowdhary. In AAMAS 2018 (Extended abstract). Paper | Video | Supplementary materials