
Gotta Scoop ’Em All: Sim-and-Real Co-Training of Graph-based Neural Dynamics for Long-Horizon Scooping
Under review, 2025.
Under review, 2025.

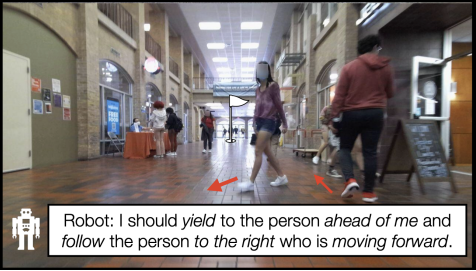
HEIGHT: Heterogeneous Interaction Graph Transformer for Robot Navigation in Crowded and Constrained Environments
Accepted in T-ASE, 2025.
Paper | Website | Video | Code
Best Paper Award at ICRA 2025 Workshop on Advances in Social Navigation: Planning, HRI and Beyond
Accepted in T-ASE, 2025.
Paper | Website | Video | Code
Best Paper Award at ICRA 2025 Workshop on Advances in Social Navigation: Planning, HRI and Beyond
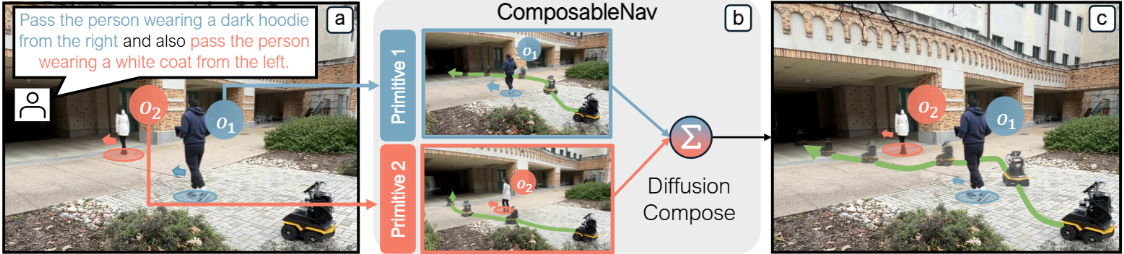
ComposableNav: Composable Instruction-Following Navigation in Dynamic Environments via Diffusion
In CoRL 2025.
Paper | Website | Code | Checkpoints
In CoRL 2025.
Paper | Website | Code | Checkpoints

Tool-as-Interface: Learning Robot Policies from Observing Human Tool Use
In CoRL 2025.
Paper | Website | Code | Video | Media coverage
In CoRL 2025.
Paper | Website | Code | Video | Media coverage

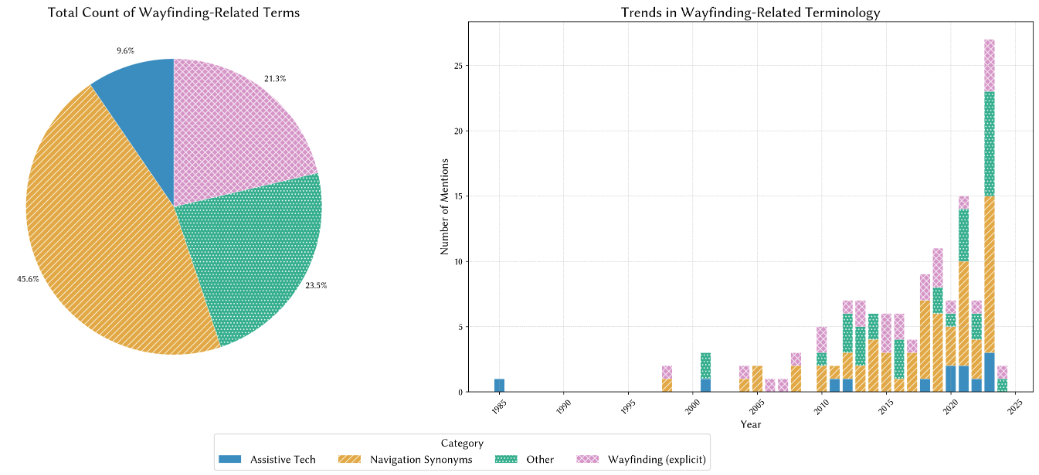
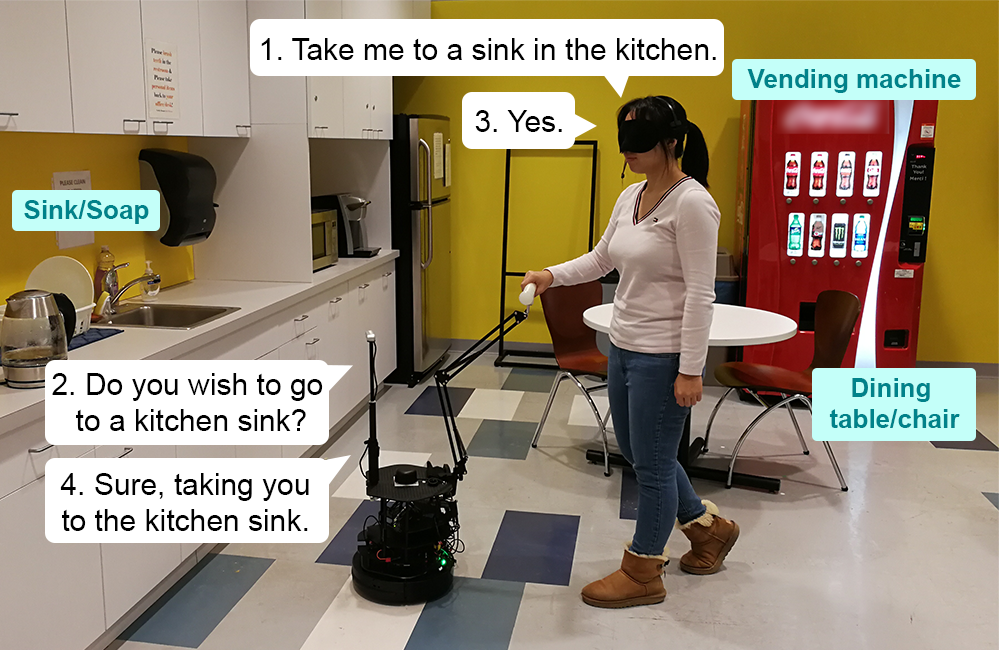
Developing Wayfinding Robotic Support for Older Persons with Vision Impairments
In Assistive Technology, 2025.
Paper
In Assistive Technology, 2025.
Paper

Intention Aware Robot Crowd Navigation with Attention-Based Interaction Graph
In ICRA 2023.
Paper | Website | Video | Code
Best poster award at IROS 2023 Last-Mile Robotics Workshop
In ICRA 2023.
Paper | Website | Video | Code
Best poster award at IROS 2023 Last-Mile Robotics Workshop


Occlusion-Aware Crowd Navigation Using People as Sensors
In ICRA 2023.
Paper | Video | Code | Media coverage
In ICRA 2023.
Paper | Video | Code | Media coverage

Combining Model-Based Controllers and Generative Adversarial Imitation Learning for Traffic Simulation
In ITSC 2022.
Paper
In ITSC 2022.
Paper
An Interdisciplinary Approach: Potential for Robotic Support to Address Wayfinding Barriers Among Persons with Visual Impairments
In HFES 2022.
Paper
In HFES 2022.
Paper
Robust Deep Reinforcement Learning with Adversarial Attacks
In AAMAS 2018 (Extended abstract).
Paper | Video | Supplementary materials
In AAMAS 2018 (Extended abstract).
Paper | Video | Supplementary materials